National Undergraduate Electronic Design Contest
Overview
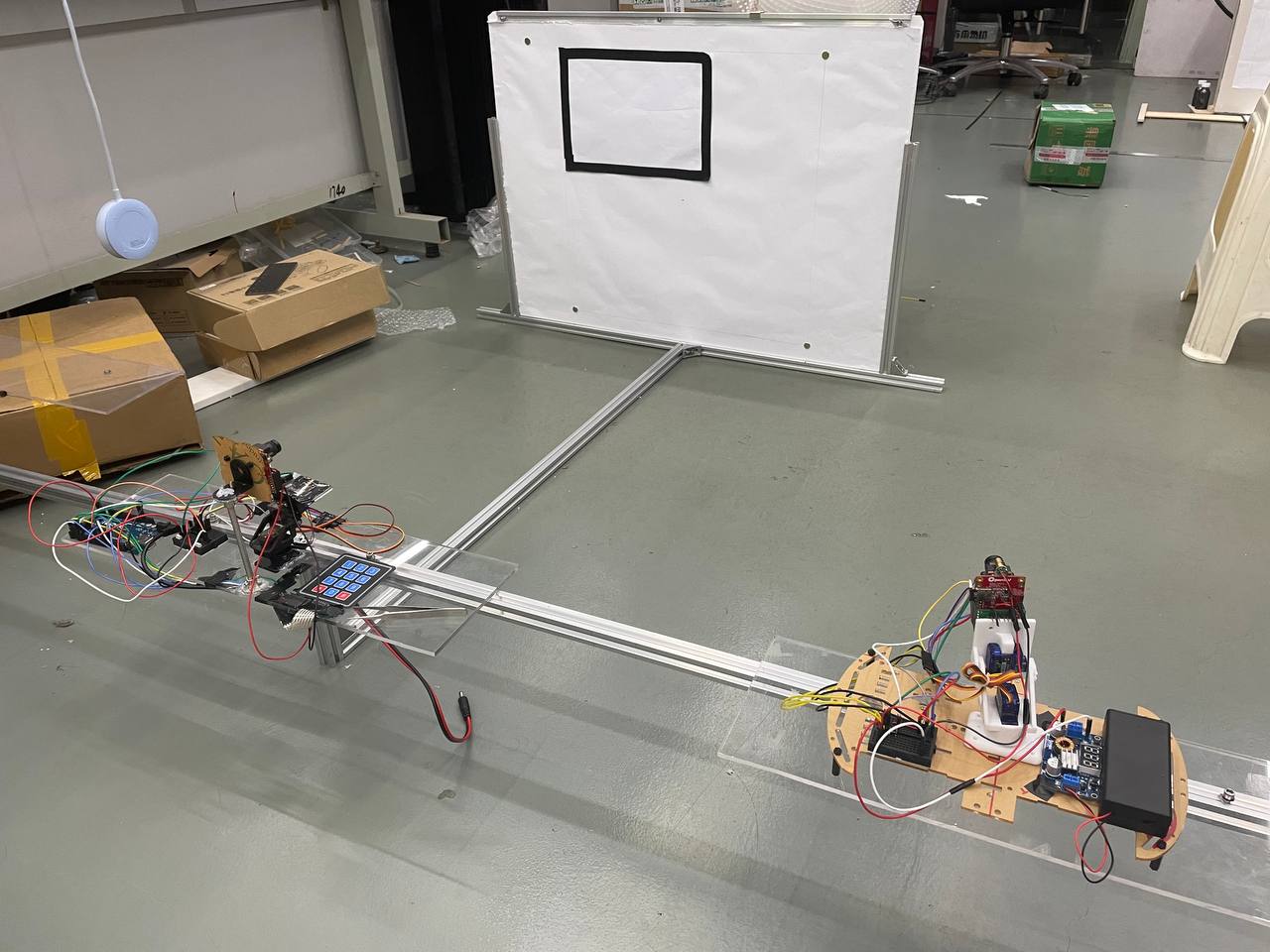
In the National Undergraduate Electronics Design Contest (NUEDC, Aug 2023), our team designed and built a vision-guided pan–tilt auto-tracking system, earning Guangdong Provincial Second Prize. The system uses OpenMV for real-time target detection and an Arduino Mega as the main controller, with discrete-time PID and Kalman filtering for closed-loop tracking under competitive time constraints.
Results
- Achievement: Guangdong Provincial Second Prize (National Undergraduate Electronics Design Contest, NUEDC).
- Performance Metrics:
- < 1 cm positioning error in static and dynamic target positioning tests.
- 0.5–0.6 s response time from target detection to stable pan–tilt lock in dynamic tracking tests.
- Presentation: Delivered a complete, working prototype under the 4-day competition time constraint.
Technical Details
- System Architecture:
- Two independent servo-driven gimbals controlled by an Arduino Mega2560 microcontroller.
- Image processing conducted via OpenMV H7 to identify and track red and green laser spots.
- Algorithms:
- Coordinate Mapping: Calibrated pixel-to-servo angle mapping via regression-based calibration to reduce geometric bias from camera lens distortion and gimbal nonlinearity.
- Motion Control: Implemented discrete-time PID control for closed-loop pan–tilt positioning with trajectory interpolation for smooth motion.
- Tracking: Applied Kalman filtering on the Arduino Mega to predict and correct target position under measurement noise, enabling stable tracking at higher target speeds.
- Challenges:
- Overcame mechanical inaccuracies by calibrating servo feedback with additional correction factors and replacing faulty servos to improve trajectory precision.
- Improved image processing robustness under varying light conditions through optimized exposure settings and LAB color space filtering.
- Enhanced tracking success rates for high-speed laser movements by adjusting control frequencies and refining PID parameters for smoother tracking.
Reflection and Insights
This competition was a test of endurance, adaptability, and teamwork. The intense four-day schedule required rapid problem-solving and collaboration. The experience highlighted the importance of robust system design and precise calibration in achieving high-performance results. It also reinforced the value of integrating advanced algorithms, such as Kalman filtering, to address real-world constraints.
Team and Role
- Team: A three-member team collaboratively handled hardware design, software development, and optimization.
- My Role:
- Led the implementation of image processing algorithms and Kalman filtering.
- Developed and tested the PID control system for trajectory tracking.
- Conducted system debugging and parameter tuning under competition constraints.