National Undergraduate Embedded Chip and System Design Competition
Overview
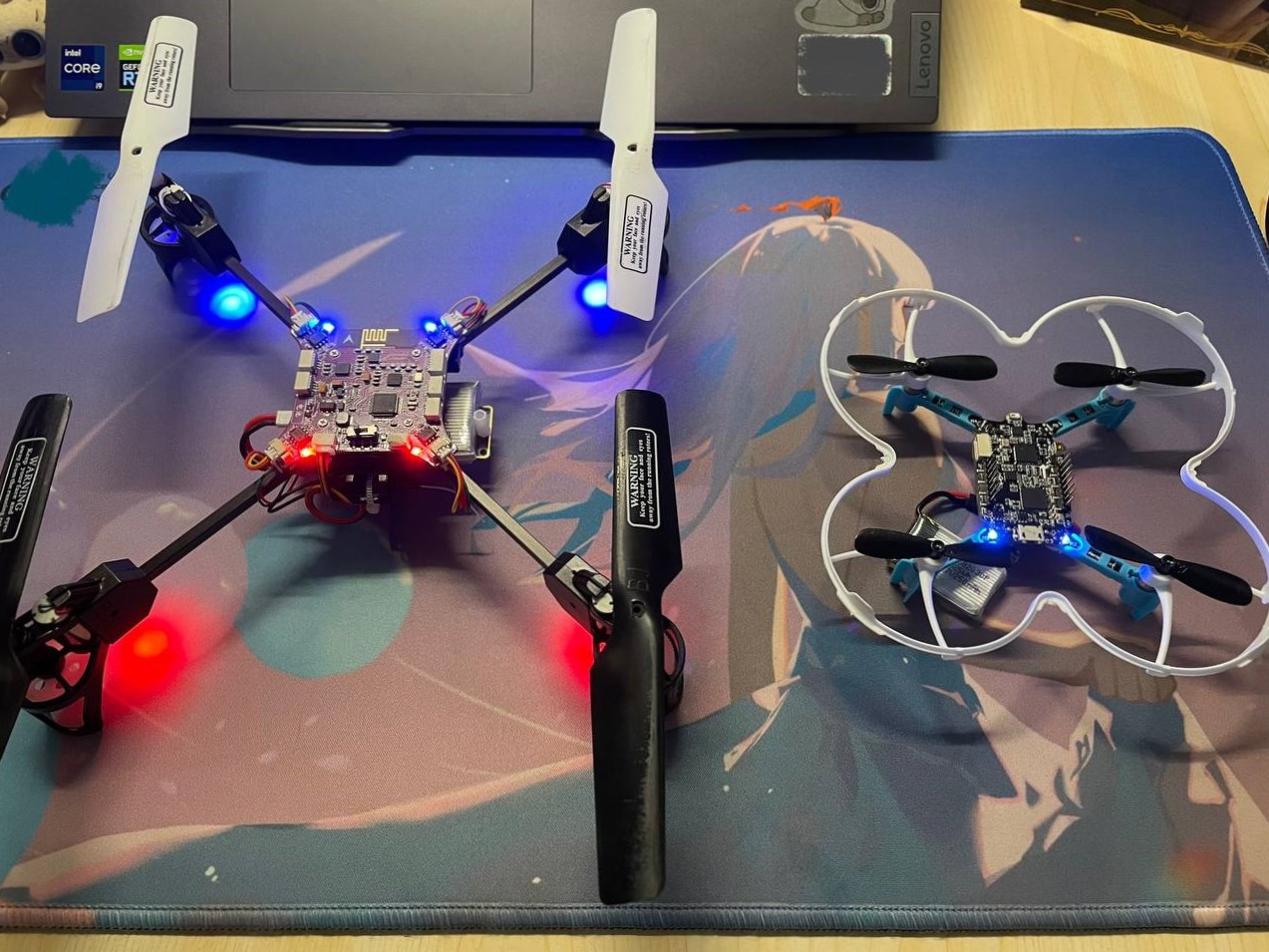
In the National Undergraduate Embedded Chip and System Design Competition (July 2023), I developed a dual-quadcopter control system using STM32F4 and NRFx series controllers. The project demonstrated motion synchronization between a primary and a secondary quadcopter through innovative wireless communication and control algorithms. This work earned us district-level recognition for its technical complexity and application potential.
Results
- Achievement: District-level recognition for innovative quadcopter motion synchronization.
- Performance Metrics:
- Wireless communication demonstrated stability over distances of up to 100 meters in controlled testing conditions.
- Achieved synchronized motion control with precise PID tuning for smooth coordination.
- Deliverables:
- A functional dual-quadcopter prototype capable of real-time motion matching.
- System robustness tested under various environmental conditions.
Technical Details
- System Architecture:
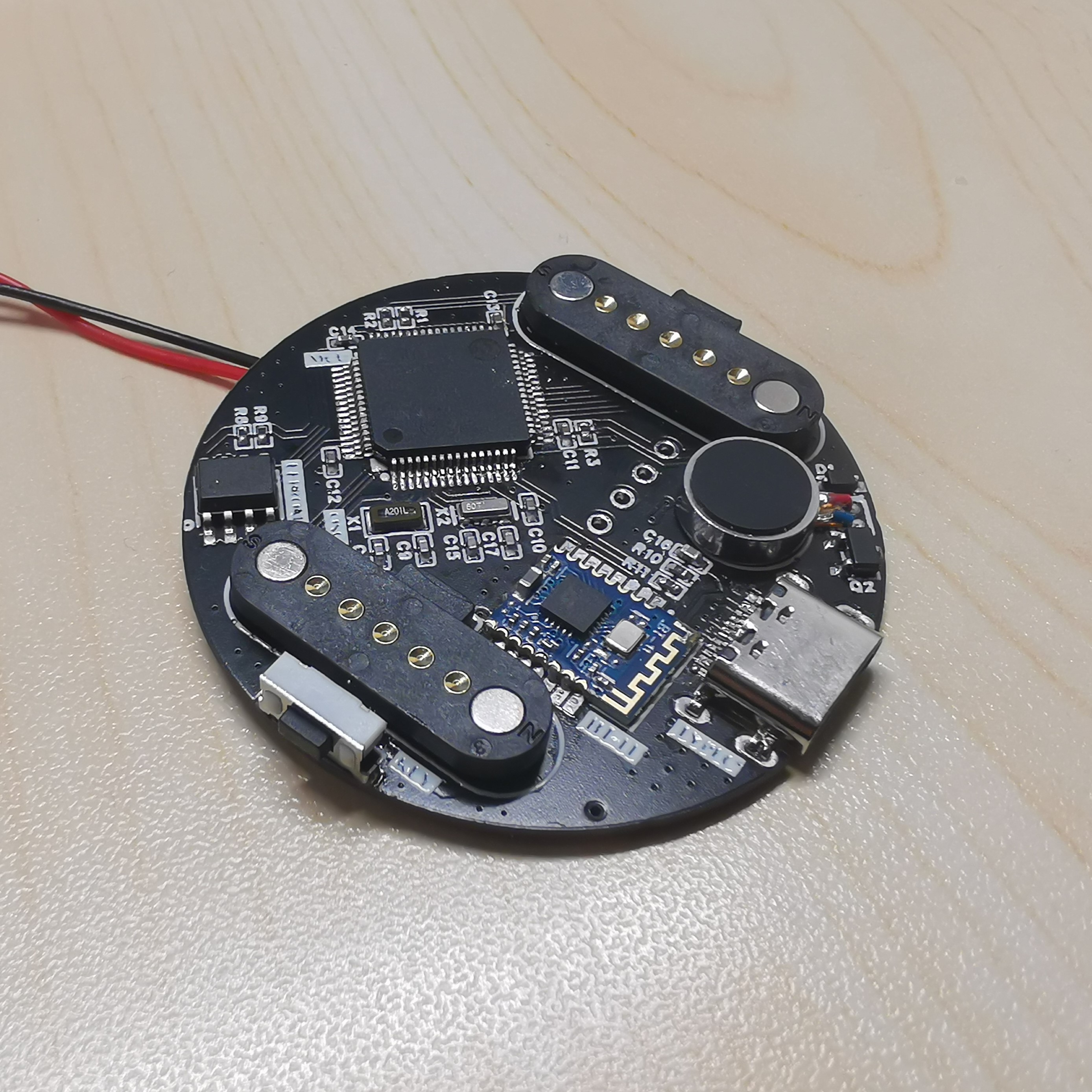
- Developed a control system with STM32F411 as the primary controller and NRF51822 for extended communication.
- Integrated sensors, including MPU9250 for attitude measurement and BMP280 for altitude control.
- Real-time task management implemented using FreeRTOS for multitasking.
- Wireless Communication:
- Leveraged NRF51822 and NRF24L01+ for long-range and low-latency communication.
- Designed custom communication protocols to support bidirectional data flow and address synchronization issues.
- Control Algorithms:
- Implemented a closed-loop PID control system for stable quadcopter motion.
- Enhanced robustness with signal filtering and fallback mechanisms to prevent flight instability.
Challenges
- Signal Interference: Addressed challenges with RF signal collisions by implementing Enhanced ShockBurst protocols and custom filtering methods.
- Synchronization Complexity: Fine-tuned PID parameters to handle discrepancies in quadcopter structure, weight, and motion dynamics.
- Hardware Limitations: Overcame initial instability in the flight control system by incorporating open-source flight control adaptations.
Reflection and Insights
This project offered valuable insights into embedded system design and wireless communication. Working through challenges such as signal interference and parameter tuning enhanced my problem-solving skills. The experience also underscored the importance of collaboration and iterative debugging in achieving stable and synchronized quadcopter control.